LEARNING-BASED POSE ESTIMATION IN AUTONOMOUS ELECTRIC VEHICLE CHARGING SYSTEM USING ROBOT ARM MANIPULATION
DOI:
https://doi.org/10.11113/jtse.v13.261Keywords:
Autonomous Electric Vehicle, Machine Learning-Based Detection, Motion Planning, Peg-in-holeAbstract
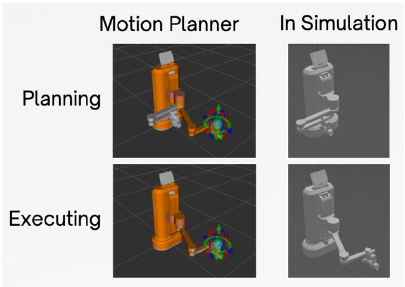
Autonomous Electric Vehicles (AEVs) require fully automated charging systems to achieve complete autonomy. However, existing charging methods still depend on manual plug insertion by users. This study presents a learning-based control algorithm for autonomous robotic charging using a four-degrees-of-freedom robot arm. The robotic arm was designed in SOLIDWORKS, simulated in Gazebo, and controlled through the Robot Operating System (ROS). An object detection model was trained using a dataset of Type 2 EV charging sockets to identify the charging port, while a depth camera estimated its three-dimensional coordinates. The detected position was then processed by a motion planner to generate a collision-free trajectory for accurate plug alignment. Simulation results demonstrated reliable charging socket detection and robotic manipulation under various operating conditions. The proposed approach achieved a precision of 0.99 and a recall of 0.98, indicating robust detection performance. The highest detection confidence score of 0.87 was obtained at a charging socket distance of 1.1 m, while the lowest score of 0.73 was recorded at 1.0 m. These findings demonstrate the potential of the proposed framework for enabling reliable and autonomous EV charging operations.
References
Murat,A. A & Kiran, M.S. (2025). A comprehensive review on YOLO versions for object detection. Engineering Science and Technology, an International Journal, 70, 102161. https://doi.org/10.1016/j.jestch.2025.102161
Ali, M. L., & Zhang, Z. (2024). The YOLO Framework: A Comprehensive Review of Evolution, Applications, and Benchmarks in Object Detection. Computers, 13(12), 336. https://doi.org/10.3390/computers13120336
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S., Fu, C.-Y. and Berg, A. (2016). ‘SSD: Single Shot MultiBox Detector’. Lecture Notes in Computer Science (Including Subseries lecture Notes in Artificial Intelligence and lecture Notes in Bioinformatics), 9905 LNCS, 21-37. https://doi.org/10.1007/978-3-319-46448-0_2.
Zhang, Z., Fang, Z., Lian, H., Zhang, C. and Yang, G. (2021). ‘Robot Peg-in-Hole Assembly System Based on Vision and Fuzzy Control’, 33rd Chinese Control and Decision Conference (CCDC). https://doi.org/10.1109/CCDC52312.2021.9602060.
Xing, X. and Chang, D.E. ‘Deep Reinforcement Learning Based Robot Arm Manipulation with Efficient Training Data through Simulation’, 19th International Conference on Control, Automation and Systems (ICCAS). https://doi.org/10.23919/ICCAS47443.2019.8971637.
Shen, Y., Jia, Q., Wang, R., Huang, Z., and Chen, G. (2023). ‘Learning-Based Visual Servoing for High-Precision Peg-in-Hole Assembly’ Actuators. https://doi.org/10.3390/act12040144.
Xu, S., Chen, K., Ou, Y., Wang Z. and Yang, C. ‘A Learning-Based Object Tracking Strategy Using Visual Sensors and Intelligent Robot Arm’, IEEE Transactions on Automation Science and Engineering. https://doi.org/10.1109/TASE.2022.3213730.
Huang, Y., Zhang, X., Chen, X. and Ota, J. (2017). ‘Vision-guided peg-in-hole assembly by Baxter robot’, Advances in Mechanical Engineering. https://doi.org/10.1177/168781401774807
Saputra, H.M., Rifansyah,R.Y., Baskoro, C. H. A. H. B.,Mohd Nor, N. S., Rijanto E. and Pahrurrozi,A.(2024) "Comparative Study of Machine Learning Models for Inverse Kinematic Prediction of a Flexible-Tube Wrist Mechanism in Robotic Charging Stations," IEEE International Conference on Smart Mechatronics (ICSMech), Yogyakarta, Indonesia, 2024, pp. 152-158, doi: 10.1109/ICSMech62936.2024.10812340.
Güney, E., Bayılmış, C., Çakar, S., Erol, E., & Atmaca, Ö. (2024). Autonomous control of shore robotic charging systems based on computer vision. Expert Systems with Applications, 238, 122116.
Jia, X., Tong, Y., Qiao, H., Li, M., Tong, J., & Liang, B. (2023). Fast and accurate object detector for autonomous driving based on improved YOLOv5. Scientific Reports, 13 (1), 1–13. https://doi.org/10.1038/s41598-023-36868-w
Lu, Y., Qiu, Z., Liao, C., Zhou, Z., Li, T., & Wu, Z. (2022). A GIS Partial Discharge Defect Identification Method Based on YOLOv5. Applied Sciences (Switzerland), 12(16). https://doi.org/10.3390/app12168360.
[13] Zhu, H., Sun, C., Zheng, Q., & Zhao, Q. (2023). Deep Learning Based Automatic Charging Identification and Positioning Method for Electric Vehicle. Computer Modeling In Engineering & Sciences, 136(3), 3265–3283. https://doi.org/10.32604/cmes.2023.025777
Chikurtev, D. (2020, October). Mobile robot simulation and navigation in ROS and Gazebo. In 2020 International Conference Automatics and Informatics (ICAI) (pp. 1-6). IEEE.
Tang, G., Liu, S., Fujino, I., Claramunt, C., Wang, Y., & Men, S. (2020). H-yolo: A single-shot ship detection approach based on a region of interest preselected network. Remote Sensing, 12(24), 1–18.https://doi.org/10.3390/rs12244192
Downloads
Published
How to Cite
Issue
Section
License
Copyright of articles that appear in Journal of Transpot System Engineering (JTSE) belongs exclusively to Penerbit Universiti Teknologi Malaysia (Penerbit UTM Press). This copyright covers the rights to reproduce the article, including reprints, electronic reproductions or any other reproductions of similar nature.
Disclaimer: The views and opinions expressed in the articles are those of the authors and do not necessarily reflect the official policy or position of the JTSE. Examples of analysis performed within are only examples and they should not be utilized in real-world. Assumptions made within the analysis are not reflective of the position of any JTSE entities.